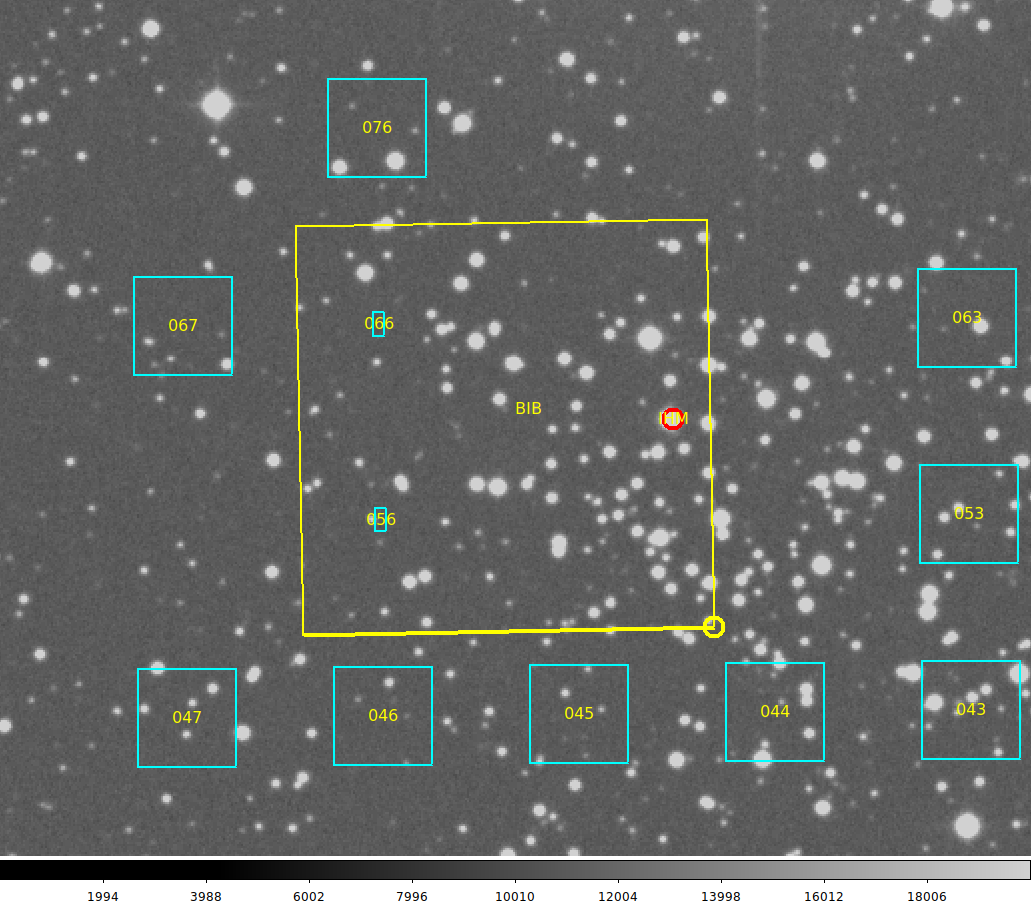
A ds9 view of a DSS image with the IHMP footprint overplotted, including the field
of the HET acquisition camera (acm) drawn in yellow. The command used to make this
(on mcs as astronomer) was:
% fgstar 06:15:20.46 +39:51:50.6 304.0 gc1 N
Usage: fgstar 06:15:20.46 +39:51:50.6 304.0 gc1 N
arg1 - RA of IHMP center (sexigecimal)
arg2 - DEC of IHMP center (sexigecimal)
arg3 - Azimuth of HET structure (degrees)
arg4 - probe name (valid names = gc1,gc2,wf1,wf2)
arg5 - run in verbose/debug mode (Y/N)
The acm has an approximately square field of view 3.5 arcminutes on a side. The pixel size
is 0.2709 ± 0.0001 arcseonds. In the view above the yellow circle repesents the X,Y=0,0
pixel location in the 775x771 pixel acm image. The thicker yellow line represents the positive Y axis.
When the acm mirror is inserted, we see that it
covers the same sky locations as three HET detectors: 066, 056, and BIB. The first two are the
red and blue IFUs of the LRS2 spectrograph, and the last is the "boresite" imaging bundle (BIB).
Lastly, the red circle is the center of the IHMP (Input Head Mounting Plate). This is the plate
that holds the VIRUS IFUs (the cyan squares above) and other detectors in the HET focal plane.
The locations of these four points (056,066,BIB,IHMP), in acm pixels, are key to pointing the
HET. The fgstar routine no longer maintains the present positions for the current acm, but this
diagram is a helpful representation for understanding how we position the HET on the sky.
|